[EIP-3030]: https://eips.ethereum.org/EIPS/eip-3030 [Web3Signer]: https://consensys.github.io/web3signer/web3signer-eth2.html ## Issue Addressed Resolves #2498 ## Proposed Changes Allows the VC to call out to a [Web3Signer] remote signer to obtain signatures. ## Additional Info ### Making Signing Functions `async` To allow remote signing, I needed to make all the signing functions `async`. This caused a bit of noise where I had to convert iterators into `for` loops. In `duties_service.rs` there was a particularly tricky case where we couldn't hold a write-lock across an `await`, so I had to first take a read-lock, then grab a write-lock. ### Move Signing from Core Executor Whilst implementing this feature, I noticed that we signing was happening on the core tokio executor. I suspect this was causing the executor to temporarily lock and occasionally trigger some HTTP timeouts (and potentially SQL pool timeouts, but I can't verify this). Since moving all signing into blocking tokio tasks, I noticed a distinct drop in the "atttestations_http_get" metric on a Prater node: 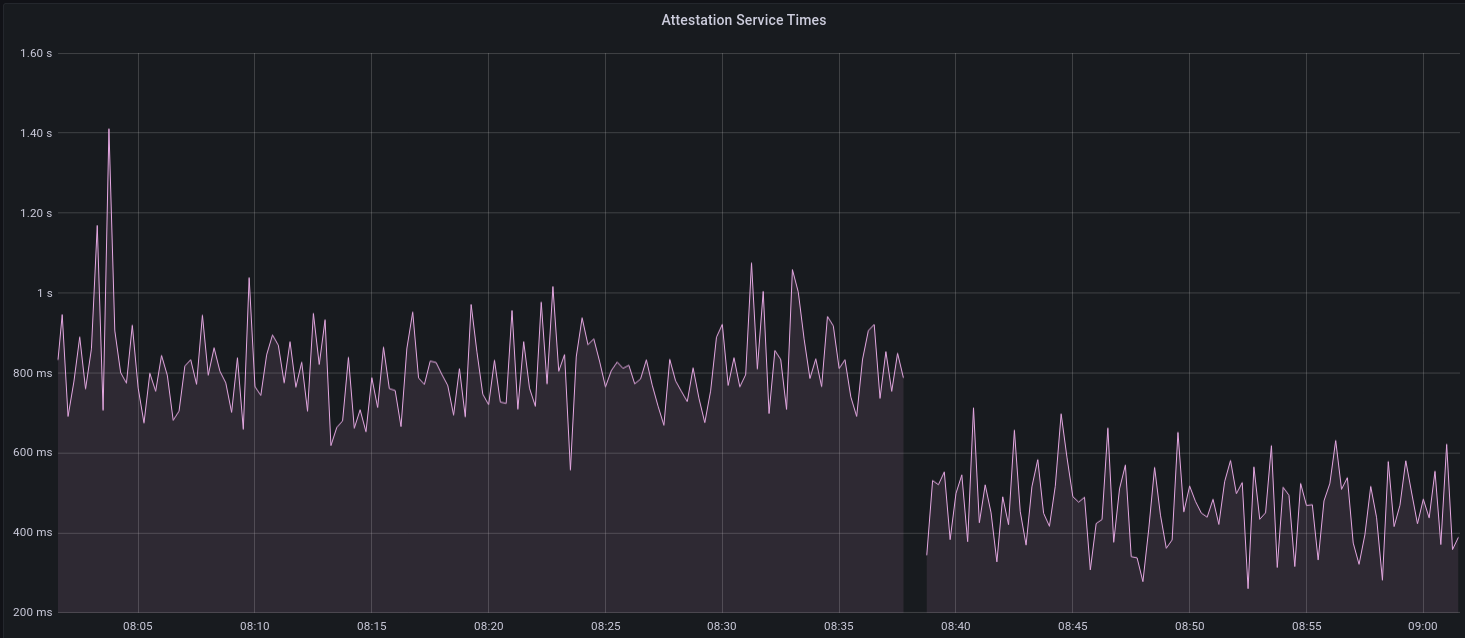 I think this graph indicates that freeing the core executor allows the VC to operate more smoothly. ### Refactor TaskExecutor I noticed that the `TaskExecutor::spawn_blocking_handle` function would fail to spawn tasks if it were unable to obtain handles to some metrics (this can happen if the same metric is defined twice). It seemed that a more sensible approach would be to keep spawning tasks, but without metrics. To that end, I refactored the function so that it would still function without metrics. There are no other changes made. ## TODO - [x] Restructure to support multiple signing methods. - [x] Add calls to remote signer from VC. - [x] Documentation - [x] Test all endpoints - [x] Test HTTPS certificate - [x] Allow adding remote signer validators via the API - [x] Add Altair support via [21.8.1-rc1](https://github.com/ConsenSys/web3signer/releases/tag/21.8.1-rc1) - [x] Create issue to start using latest version of web3signer. (See #2570) ## Notes - ~~Web3Signer doesn't yet support the Altair fork for Prater. See https://github.com/ConsenSys/web3signer/issues/423.~~ - ~~There is not yet a release of Web3Signer which supports Altair blocks. See https://github.com/ConsenSys/web3signer/issues/391.~~
{kind=link}
288 lines
10 KiB
Rust
288 lines
10 KiB
Rust
mod metrics;
|
|
|
|
use futures::channel::mpsc::Sender;
|
|
use futures::prelude::*;
|
|
use slog::{crit, debug, o, trace};
|
|
use std::sync::Weak;
|
|
use tokio::runtime::Runtime;
|
|
|
|
/// Provides a reason when Lighthouse is shut down.
|
|
#[derive(Copy, Clone, Debug)]
|
|
pub enum ShutdownReason {
|
|
/// The node shut down successfully.
|
|
Success(&'static str),
|
|
/// The node shut down due to an error condition.
|
|
Failure(&'static str),
|
|
}
|
|
|
|
impl ShutdownReason {
|
|
pub fn message(&self) -> &'static str {
|
|
match self {
|
|
ShutdownReason::Success(msg) => msg,
|
|
ShutdownReason::Failure(msg) => msg,
|
|
}
|
|
}
|
|
}
|
|
|
|
/// A wrapper over a runtime handle which can spawn async and blocking tasks.
|
|
#[derive(Clone)]
|
|
pub struct TaskExecutor {
|
|
/// The handle to the runtime on which tasks are spawned
|
|
runtime: Weak<Runtime>,
|
|
/// The receiver exit future which on receiving shuts down the task
|
|
exit: exit_future::Exit,
|
|
/// Sender given to tasks, so that if they encounter a state in which execution cannot
|
|
/// continue they can request that everything shuts down.
|
|
///
|
|
/// The task must provide a reason for shutting down.
|
|
signal_tx: Sender<ShutdownReason>,
|
|
|
|
log: slog::Logger,
|
|
}
|
|
|
|
impl TaskExecutor {
|
|
/// Create a new task executor.
|
|
///
|
|
/// Note: this function is mainly useful in tests. A `TaskExecutor` should be normally obtained from
|
|
/// a [`RuntimeContext`](struct.RuntimeContext.html)
|
|
pub fn new(
|
|
runtime: Weak<Runtime>,
|
|
exit: exit_future::Exit,
|
|
log: slog::Logger,
|
|
signal_tx: Sender<ShutdownReason>,
|
|
) -> Self {
|
|
Self {
|
|
runtime,
|
|
exit,
|
|
signal_tx,
|
|
log,
|
|
}
|
|
}
|
|
|
|
/// Clones the task executor adding a service name.
|
|
pub fn clone_with_name(&self, service_name: String) -> Self {
|
|
TaskExecutor {
|
|
runtime: self.runtime.clone(),
|
|
exit: self.exit.clone(),
|
|
signal_tx: self.signal_tx.clone(),
|
|
log: self.log.new(o!("service" => service_name)),
|
|
}
|
|
}
|
|
|
|
/// A convenience wrapper for `Self::spawn` which ignores a `Result` as long as both `Ok`/`Err`
|
|
/// are of type `()`.
|
|
///
|
|
/// The purpose of this function is to create a compile error if some function which previously
|
|
/// returned `()` starts returning something else. Such a case may otherwise result in
|
|
/// accidental error suppression.
|
|
pub fn spawn_ignoring_error(
|
|
&self,
|
|
task: impl Future<Output = Result<(), ()>> + Send + 'static,
|
|
name: &'static str,
|
|
) {
|
|
self.spawn(task.map(|_| ()), name)
|
|
}
|
|
|
|
/// Spawn a task to monitor the completion of another task.
|
|
///
|
|
/// If the other task exits by panicking, then the monitor task will shut down the executor.
|
|
fn spawn_monitor<R: Send>(
|
|
&self,
|
|
task_handle: impl Future<Output = Result<R, tokio::task::JoinError>> + Send + 'static,
|
|
name: &'static str,
|
|
) {
|
|
let mut shutdown_sender = self.shutdown_sender();
|
|
let log = self.log.clone();
|
|
|
|
if let Some(runtime) = self.runtime.upgrade() {
|
|
runtime.spawn(async move {
|
|
if let Err(join_error) = task_handle.await {
|
|
if let Ok(panic) = join_error.try_into_panic() {
|
|
let message = panic.downcast_ref::<&str>().unwrap_or(&"<none>");
|
|
|
|
crit!(
|
|
log,
|
|
"Task panic. This is a bug!";
|
|
"task_name" => name,
|
|
"message" => message,
|
|
"advice" => "Please check above for a backtrace and notify \
|
|
the developers"
|
|
);
|
|
let _ = shutdown_sender
|
|
.try_send(ShutdownReason::Failure("Panic (fatal error)"));
|
|
}
|
|
}
|
|
});
|
|
} else {
|
|
debug!(
|
|
self.log,
|
|
"Couldn't spawn monitor task. Runtime shutting down"
|
|
)
|
|
}
|
|
}
|
|
|
|
/// Spawn a future on the tokio runtime.
|
|
///
|
|
/// The future is wrapped in an `exit_future::Exit`. The task is canceled when the corresponding
|
|
/// exit_future `Signal` is fired/dropped.
|
|
///
|
|
/// The future is monitored via another spawned future to ensure that it doesn't panic. In case
|
|
/// of a panic, the executor will be shut down via `self.signal_tx`.
|
|
///
|
|
/// This function generates prometheus metrics on number of tasks and task duration.
|
|
pub fn spawn(&self, task: impl Future<Output = ()> + Send + 'static, name: &'static str) {
|
|
if let Some(task_handle) = self.spawn_handle(task, name) {
|
|
self.spawn_monitor(task_handle, name)
|
|
}
|
|
}
|
|
|
|
/// Spawn a future on the tokio runtime. This function does not wrap the task in an `exit_future::Exit`
|
|
/// like [spawn](#method.spawn).
|
|
/// The caller of this function is responsible for wrapping up the task with an `exit_future::Exit` to
|
|
/// ensure that the task gets canceled appropriately.
|
|
/// This function generates prometheus metrics on number of tasks and task duration.
|
|
///
|
|
/// This is useful in cases where the future to be spawned needs to do additional cleanup work when
|
|
/// the task is completed/canceled (e.g. writing local variables to disk) or the task is created from
|
|
/// some framework which does its own cleanup (e.g. a hyper server).
|
|
pub fn spawn_without_exit(
|
|
&self,
|
|
task: impl Future<Output = ()> + Send + 'static,
|
|
name: &'static str,
|
|
) {
|
|
if let Some(int_gauge) = metrics::get_int_gauge(&metrics::ASYNC_TASKS_COUNT, &[name]) {
|
|
let int_gauge_1 = int_gauge.clone();
|
|
let future = task.then(move |_| {
|
|
int_gauge_1.dec();
|
|
futures::future::ready(())
|
|
});
|
|
|
|
int_gauge.inc();
|
|
if let Some(runtime) = self.runtime.upgrade() {
|
|
runtime.spawn(future);
|
|
} else {
|
|
debug!(self.log, "Couldn't spawn task. Runtime shutting down");
|
|
}
|
|
}
|
|
}
|
|
|
|
/// Spawn a blocking task on a dedicated tokio thread pool wrapped in an exit future.
|
|
/// This function generates prometheus metrics on number of tasks and task duration.
|
|
pub fn spawn_blocking<F>(&self, task: F, name: &'static str)
|
|
where
|
|
F: FnOnce() + Send + 'static,
|
|
{
|
|
if let Some(task_handle) = self.spawn_blocking_handle(task, name) {
|
|
self.spawn_monitor(task_handle, name)
|
|
}
|
|
}
|
|
|
|
/// Spawn a future on the tokio runtime wrapped in an `exit_future::Exit` returning an optional
|
|
/// join handle to the future.
|
|
/// The task is canceled when the corresponding exit_future `Signal` is fired/dropped.
|
|
///
|
|
/// This function generates prometheus metrics on number of tasks and task duration.
|
|
pub fn spawn_handle<R: Send + 'static>(
|
|
&self,
|
|
task: impl Future<Output = R> + Send + 'static,
|
|
name: &'static str,
|
|
) -> Option<tokio::task::JoinHandle<Option<R>>> {
|
|
let exit = self.exit.clone();
|
|
let log = self.log.clone();
|
|
|
|
if let Some(int_gauge) = metrics::get_int_gauge(&metrics::ASYNC_TASKS_COUNT, &[name]) {
|
|
// Task is shutdown before it completes if `exit` receives
|
|
let int_gauge_1 = int_gauge.clone();
|
|
let future = future::select(Box::pin(task), exit).then(move |either| {
|
|
let result = match either {
|
|
future::Either::Left((value, _)) => {
|
|
trace!(log, "Async task completed"; "task" => name);
|
|
Some(value)
|
|
}
|
|
future::Either::Right(_) => {
|
|
debug!(log, "Async task shutdown, exit received"; "task" => name);
|
|
None
|
|
}
|
|
};
|
|
int_gauge_1.dec();
|
|
futures::future::ready(result)
|
|
});
|
|
|
|
int_gauge.inc();
|
|
if let Some(runtime) = self.runtime.upgrade() {
|
|
Some(runtime.spawn(future))
|
|
} else {
|
|
debug!(self.log, "Couldn't spawn task. Runtime shutting down");
|
|
None
|
|
}
|
|
} else {
|
|
None
|
|
}
|
|
}
|
|
|
|
/// Spawn a blocking task on a dedicated tokio thread pool wrapped in an exit future returning
|
|
/// a join handle to the future.
|
|
/// If the runtime doesn't exist, this will return None.
|
|
/// The Future returned behaves like the standard JoinHandle which can return an error if the
|
|
/// task failed.
|
|
/// This function generates prometheus metrics on number of tasks and task duration.
|
|
pub fn spawn_blocking_handle<F, R>(
|
|
&self,
|
|
task: F,
|
|
name: &'static str,
|
|
) -> Option<impl Future<Output = Result<R, tokio::task::JoinError>>>
|
|
where
|
|
F: FnOnce() -> R + Send + 'static,
|
|
R: Send + 'static,
|
|
{
|
|
let log = self.log.clone();
|
|
|
|
let timer = metrics::start_timer_vec(&metrics::BLOCKING_TASKS_HISTOGRAM, &[name]);
|
|
metrics::inc_gauge_vec(&metrics::BLOCKING_TASKS_COUNT, &[name]);
|
|
|
|
let join_handle = if let Some(runtime) = self.runtime.upgrade() {
|
|
runtime.spawn_blocking(task)
|
|
} else {
|
|
debug!(self.log, "Couldn't spawn task. Runtime shutting down");
|
|
return None;
|
|
};
|
|
|
|
let future = async move {
|
|
let result = match join_handle.await {
|
|
Ok(result) => {
|
|
trace!(log, "Blocking task completed"; "task" => name);
|
|
Ok(result)
|
|
}
|
|
Err(e) => {
|
|
debug!(log, "Blocking task ended unexpectedly"; "error" => %e);
|
|
Err(e)
|
|
}
|
|
};
|
|
drop(timer);
|
|
metrics::dec_gauge_vec(&metrics::BLOCKING_TASKS_COUNT, &[name]);
|
|
result
|
|
};
|
|
|
|
Some(future)
|
|
}
|
|
|
|
pub fn runtime(&self) -> Weak<Runtime> {
|
|
self.runtime.clone()
|
|
}
|
|
|
|
/// Returns a copy of the `exit_future::Exit`.
|
|
pub fn exit(&self) -> exit_future::Exit {
|
|
self.exit.clone()
|
|
}
|
|
|
|
/// Get a channel to request shutting down.
|
|
pub fn shutdown_sender(&self) -> Sender<ShutdownReason> {
|
|
self.signal_tx.clone()
|
|
}
|
|
|
|
/// Returns a reference to the logger.
|
|
pub fn log(&self) -> &slog::Logger {
|
|
&self.log
|
|
}
|
|
}
|